为了买到可达鸭儿童套餐
小编连续蹲守了几天
可就是没有啊

痛定思痛,我们决定自己动手做一个!
实验器材
所标杯、纸板、竹签、笔、剪刀、热熔胶(或胶水)

实验过程
首先我们对着可达鸭图片描出身体及双臂
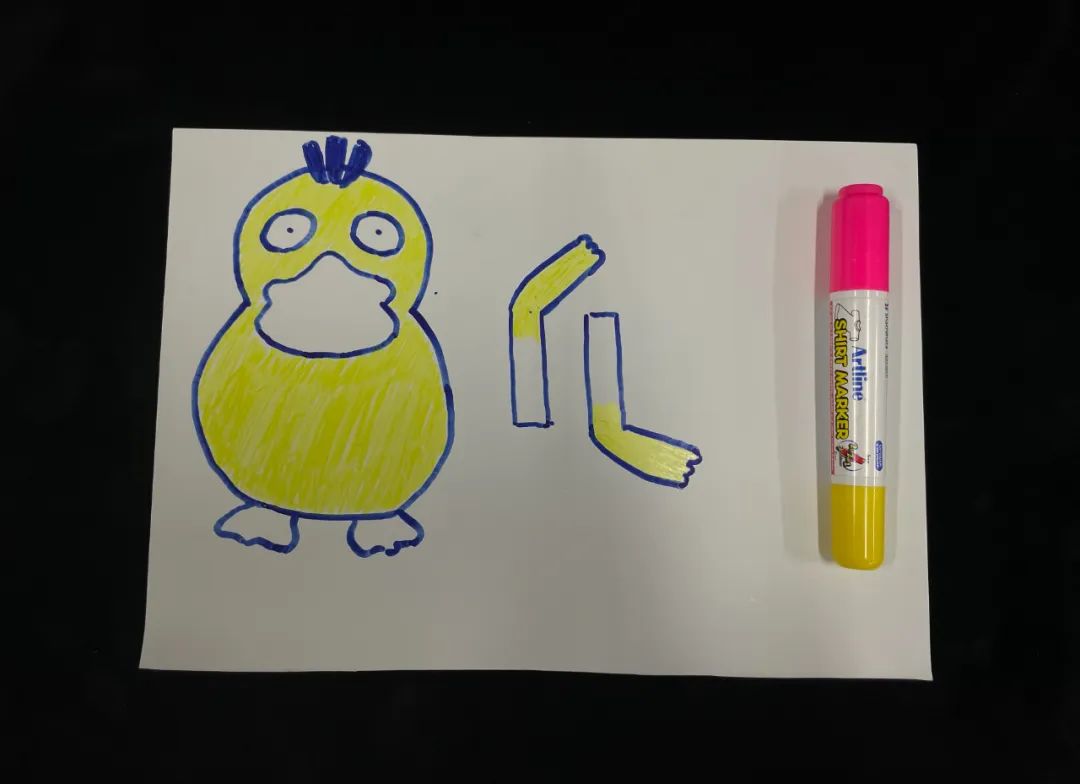
然后用剪刀将它们剪下

现在我们来做机械部分:
把竹签剪成合适的长短,摆成如图的形状:
这个小长方形不需要很大
用胶将它们粘起来

再用纸板卷成两个小纸筒
套在小长方形的两条长边上
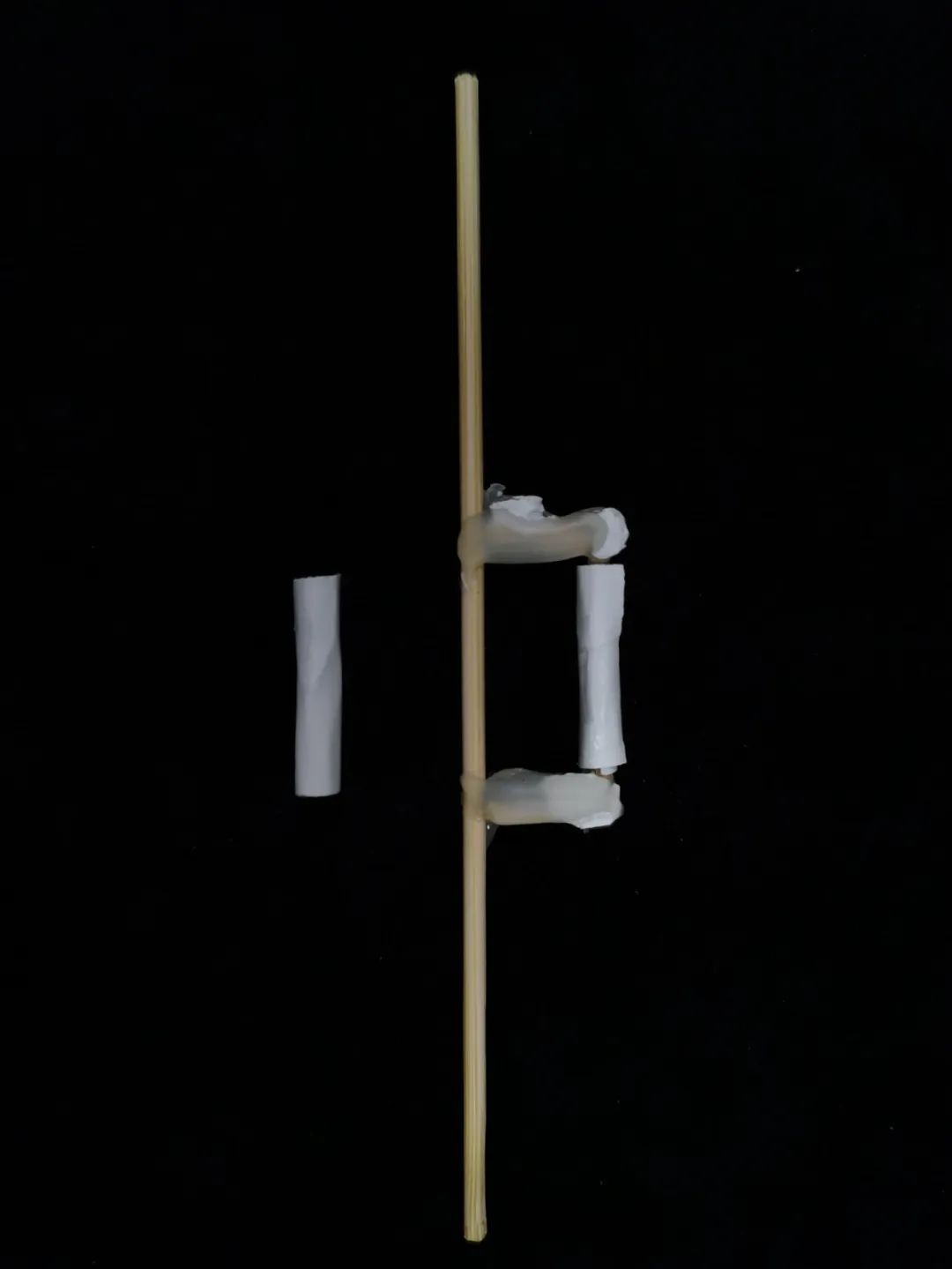
另取一根竹签在其一侧粘上一块小纸板
然后将小纸筒分别粘于可达鸭的肩膀以及长竹签的小纸板上
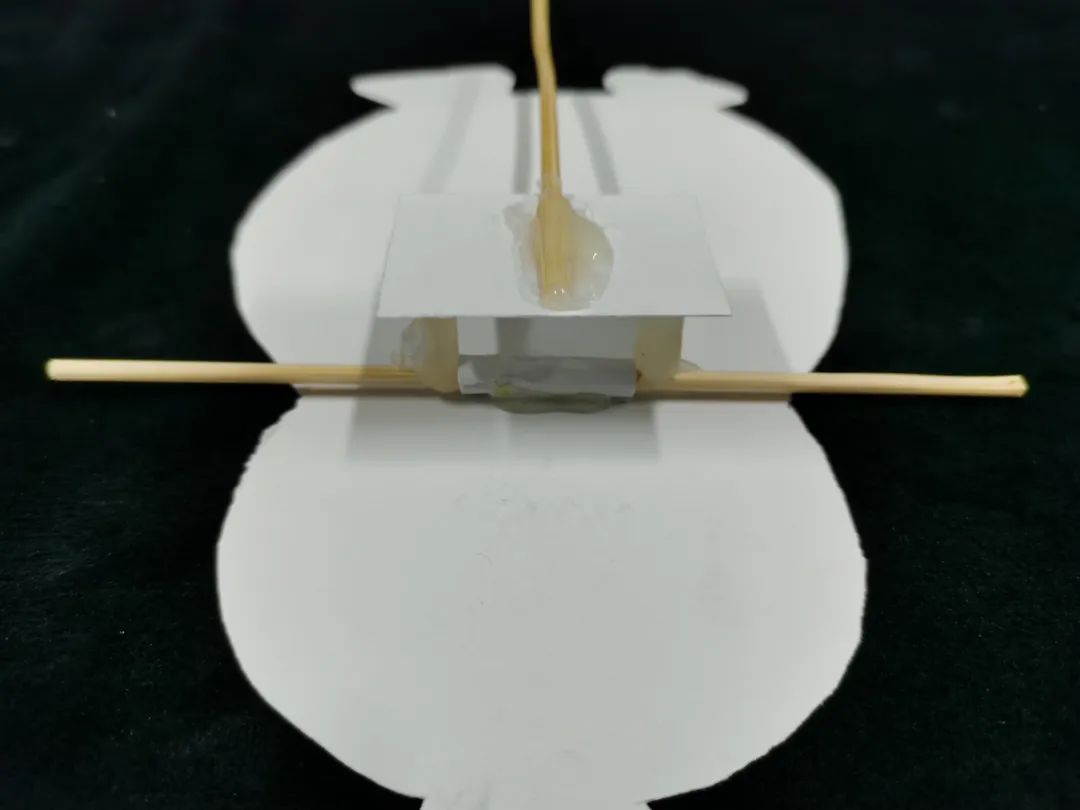
最后我们将肩膀上的竹签剪至合适的长度
并给可达鸭接上手臂
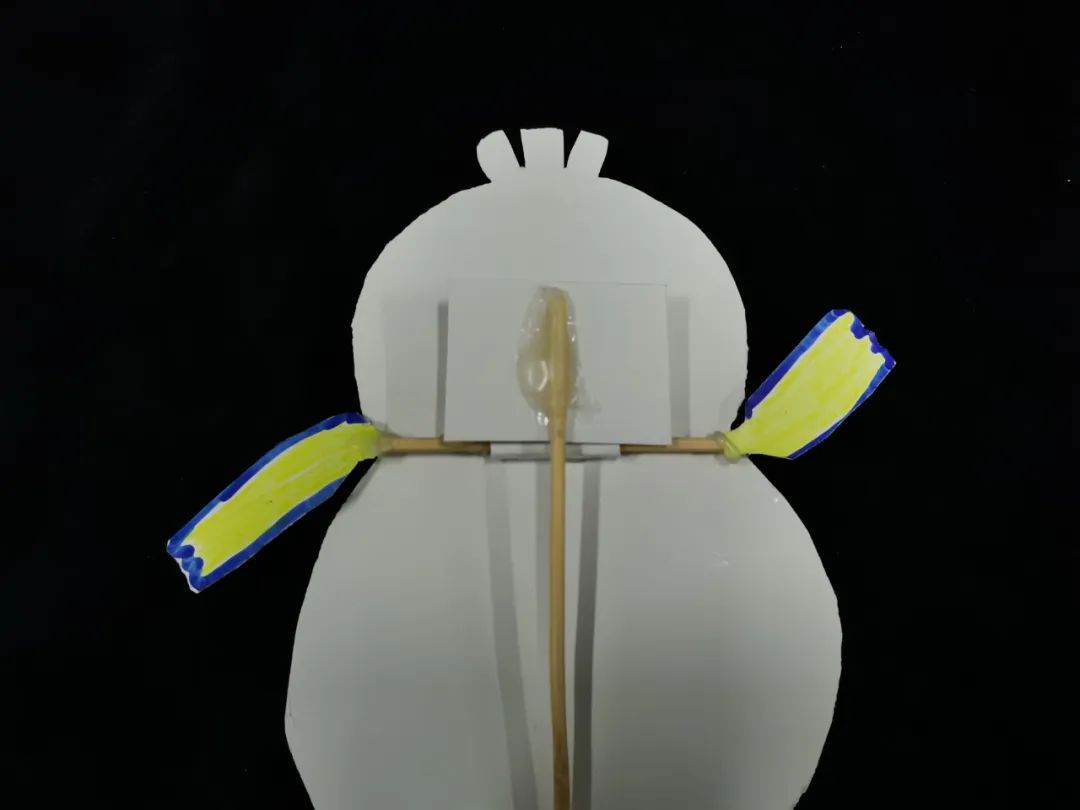
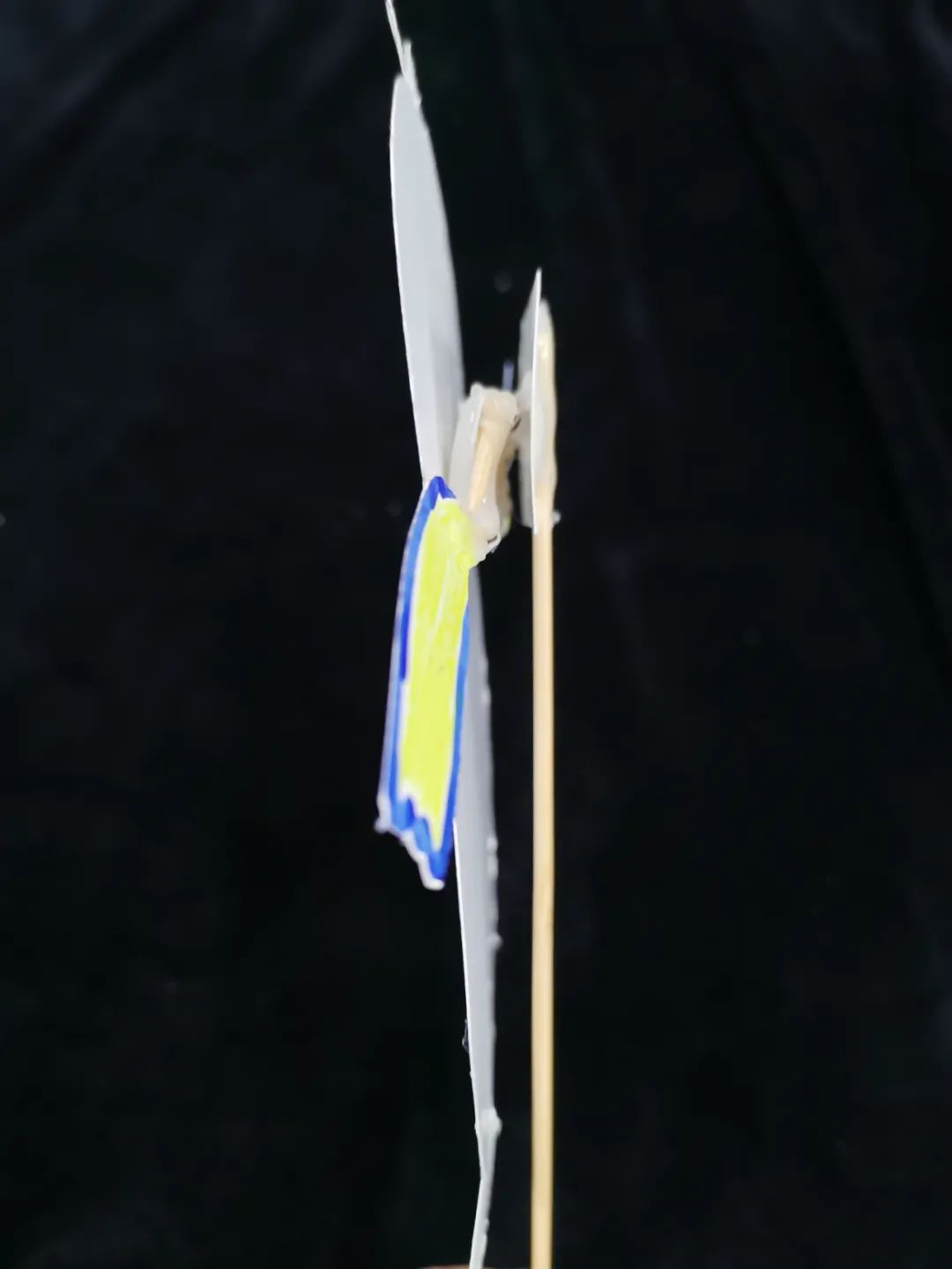
此时甩动、戳动这根长竹签,
可达鸭便可以像玩具一样边跳边挥手啦~
原理解说
不论是折纸中的抽拉结构,还是这次我们使用的摇杆,都源于连杆机构。连杆机构中的不同构件,即折纸中折痕两端的部分以及这次小实验中的两根竹签,有着不同的运动模式,而通过面接触(折痕以及这次小实验中的纸筒)连接在一起,形成运动的传递。折纸和竹签的结构都比较类似于摇杆-滑块结构,如图所示:
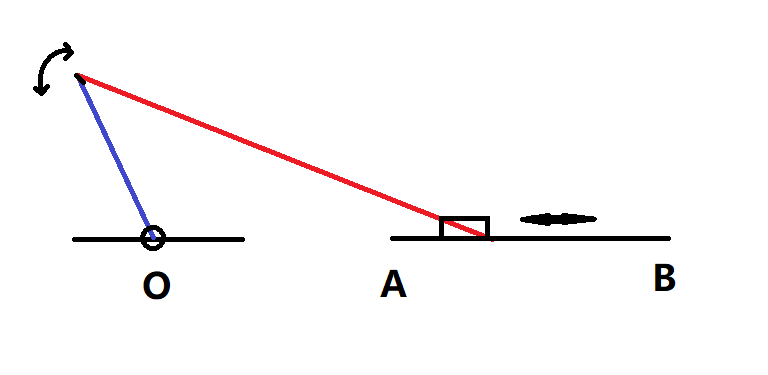
蓝色的摇杆可以绕固定点O旋转,而红色的拉杆连接着可以在线段AB上移动的滑块。所以只需要通过滑块(即纸条、竹签的末端)的平动即可带动摇杆的旋转,让可达鸭的手臂摇动起来。
在我们的小实验中我们还用到了另外一些物理小窍门:
我们可达鸭的两种状态中,可达鸭身体相对于竹签角度较低的状态,大家应该不难发现,是由可达鸭的自重导致的。在重力作用下可达鸭达到最低处形成稳定平衡。
而在我们甩动可达鸭时,受离心作用的影响可达鸭的质心倾向于向竹签远端(即上端)移动,因此达到了高位。由于可达鸭的屁股和竹签形成了一个夹角,纸板和竹签之间较强的摩擦力克服了重力带来的力矩,所以形成了一个亚稳态。

而在用竹签戳几下桌子之后,扰动破坏了这个亚稳态,可达鸭便回到了低的状态。
在高低两种状态时可达鸭的手臂随着摇杆转动了180°,实现了手臂的抬起与落下。
| 留言与评论(共有 0 条评论) “” |













