就像人类驾驶员一样,自动驾驶汽车也需要看清周围的情况,从而避开障碍物、安全行驶。当前,大多数自动驾驶汽车通常使用激光雷达来充当它们的眼睛,获取与周围物体之间的距离信息,从而决定下一秒采取什么样的行动是安全的。但事实证明,这些“眼睛”是可以被欺骗的。近日,来自美国佛罗里达大学、密歇根大学和日本电气通信大学的研究团队发现,将伪造的激光照射在逐渐接近的激光雷达系统上,可以在车辆前面制造一个大到足以完全隐藏移动行人和其他障碍的盲点(45 度范围,90% 目标障碍云点),且成功率高达 92.7%。他们表示,被删除的数据会导致汽车认为前方道路可以安全地继续行驶,从而危及攻击盲点中可能存在的任何物体。
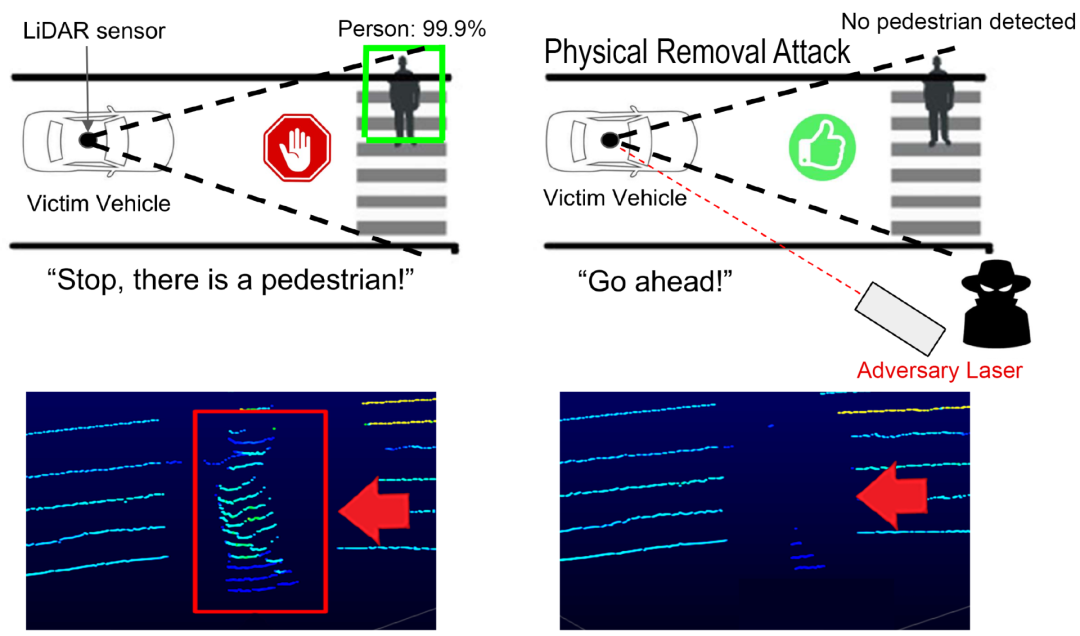
这是激光雷达传感器第一次被诱骗删除有关障碍物的数据。同时,研究团队也提出了可以消除这一潜在攻击危害的防御策略。激光雷达的工作原理是,通过发射激光并捕捉反射来计算距离,就像蝙蝠利用回声进行回声定位一样。如果制造一种虚假的发射,就可以成功干扰激光雷达传感器,从而有可能危害到周围行人的安全。“我们使用一种特定的激光模拟激光雷达反射,使自动驾驶汽车上的激光雷达传感器忽略来自周围真实障碍物的其他反射,” 佛罗里达大学计算机和信息科学与工程教授 Sara Rampazzi 说。“虽然激光雷达仍然可以接收来自周围障碍物的真实数据,但它们只能感知到虚假的反射,从而‘自动’丢弃真实数据。”
图|向激光雷达传感器注入欺骗数据点,使其丢弃传感器前方障碍物的真实数据。(来源:佛罗里达大学)
在此次研究中,Rampazzi 等人将“攻击者”放置在距离路边约 15 英尺(4.57 米)的位置,成功攻击了移动的自动驾驶汽车或机器人。理论上,通过设备升级,攻击可以在更远的位置完成,且所需的技术都是相当基础的。唯一的要求是,用来攻击的激光必须完美地与激光雷达传感器同步,移动的车辆必须被完美跟踪,以保持激光指向正确的方向。
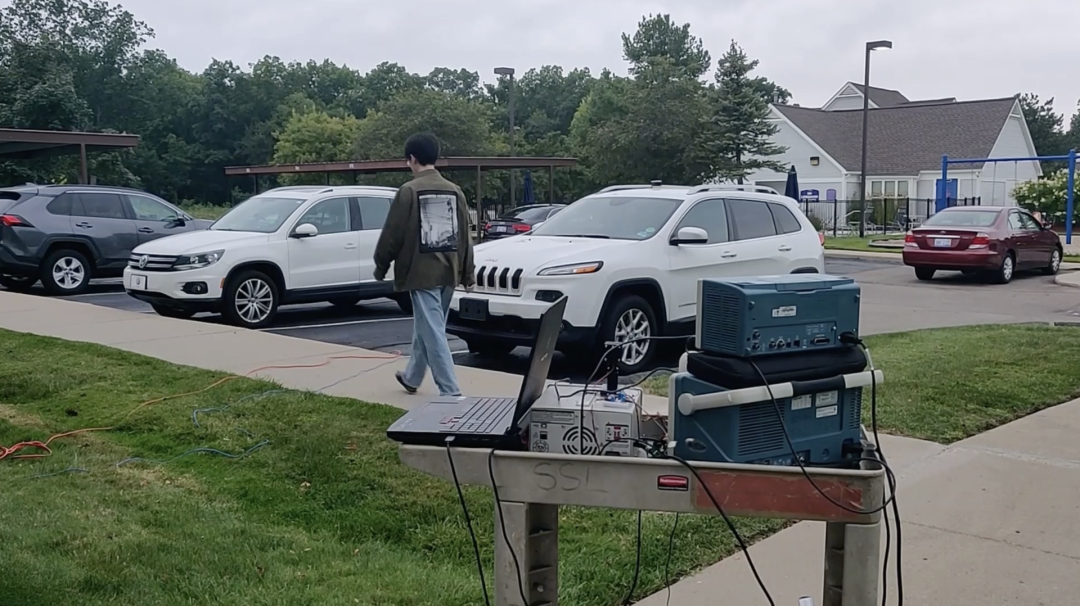
“这主要是激光与激光雷达设备的同步问题。你需要的信息通常可以从制造商那里公开获得,”Rampazzi 实验室的博士生 S. Hrushikesh Bhupathiraju 说。利用这一攻击,研究团队能够轻松删除静态障碍和移动行人的数据。
视频|被欺骗的激光雷达系统无法看到移动的行人
通过真实世界的实验证明,利用简单的摄像头跟踪设备,攻击就可以跟踪缓慢移动的车辆。在自动驾驶汽车决策的模拟中,数据的删除会导致汽车继续加速驶向一个它看不见的行人,而不是停下来。研究团队建议,更新激光雷达传感器或解释原始数据的软件可以解决这个漏洞。例如,制造商可以教软件如何找到由激光攻击带来的欺骗性反射的明显特征。对此,密歇根大学博士生 Yulong Cao 表示,“我们证明了以前的防御策略是不够的,并提出了应该解决这一漏洞的改进建议,揭示这种漏洞可以帮助我们建立一个更可靠的自动驾驶系统。”
参考链接:https://arxiv.org/abs/2210.09482
https://cpseclab.github.io/youcantseeme/
不代表中科院物理所立场
来源:学术头条
编辑:扫地僧
| 留言与评论(共有 0 条评论) “” |